
Dit artikel is ook gepubliceerd in Modelvliegsport nummer 4-2015.
Aerodynamica voor modelhelipiloten
Praktische informatie voor modelvliegers op helikopters, deel 1.
Tekst en foto’s: Bald de Boer, tekeningen: Charles. E. Dole
Al heel lang ben ik van mening dat het uit het hoofd kennen van bijvoorbeeld de liftformule je geen betere vlieger maakt. En toch is een beetje inzicht in het gedrag van een vliegtuig of helikopter van belang om er goed mee om te gaan en vooral om risico’s in te schatten en potentieel gevaarlijke situaties te vermijden. In deze reeks ga ik in op de gedragingen van een helikopter, zo eenvoudig mogelijk uitgelegd. Zonder formules dus. Het grootste deel schrijf ik uit mijn hoofd, maar mijn meest geraadpleegde bron is het boek Flight Theory For Pilots (Fourth Edition) van Charles E. Dole, dat ik ooit als lesboek had. Hieruit komen ook de tekeningen. Wellicht is het raadzaam om je heli op tafel te zetten en daarmee te bezien of je mijn betoog kunt volgen. Zelf heb ik er ook een voor me uitgestald, evenals nog een paar boekwerken ter referentie.
Wat is een helikopter?

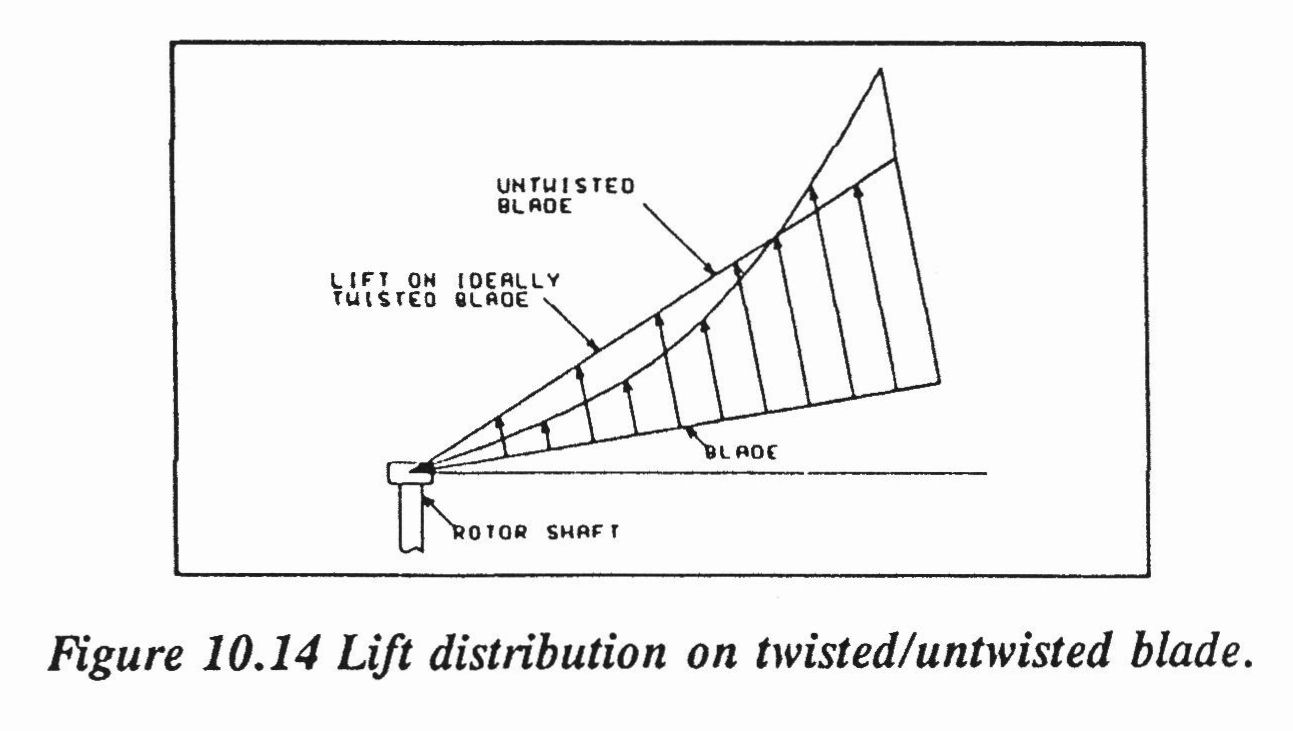
Eigenlijk is een helikopter niets anders dan een ‘vliegtuig met dak aandrijving’. Dat wil zeggen, het reageert in de voorwaartse vlucht net als een eenvoudig propellervliegtuig. De neusstand bepaalt de snelheid en het vermogen de hoogte. Maar het vliegt om heel andere redenen. Er is immers geen vaste vleugel die lift produceert. De lift waarmee het toestel zich van de aarde kan verheffen wordt geproduceerd door twee of meer ronddraaiende hoofdrotorbladen, die zich ongeveer in het zwaartepunt ‘op het dak’ bevinden. Aan de uiteinden hebben de bladen een hogere snelheid dan aan de wortel, dus om enigszins gelijkmatig lift te kunnen leveren moet de invalshoek aan het eind van het blad kleiner zijn dan aan de wortel. Daarom zit er in het blad een verdraaiing of ‘twist (zie figuur 10.14). Dit is bij modelheli’s meestal niet het geval, bij mijn voorbeeld (T-rex 500 Pro) is het in ieder geval niet zichtbaar.
Aangezien actie = reactie altijd opgaat (derde wet van Newton), wil de romp tijdens de normale vlucht met vermogen vanwege de torsie (torque) de andere kant op draaien dan de rotorbladen. Om dit tegen te gaan hebben we twee hulpjes: een staart met kielvlak en een staartrotor. Het kielvlak zorgt door de voorwaartse snelheid voor windvanen, zodat de romp niet helemaal rond gaat. Maar bij de relatief lage snelheden van een helikopter is dit niet voldoende en zou de heli scheef door de lucht vliegen. En als de heli stil hangt zal de romp zeker de andere kant op willen draaien. Daarom is er ook een staartrotor. De staartrotor blaast (of zuigt, er zijn twee soorten staartrotor) lucht tegen te draairichting van de romp in en heft die op (zie figuur 10.17).
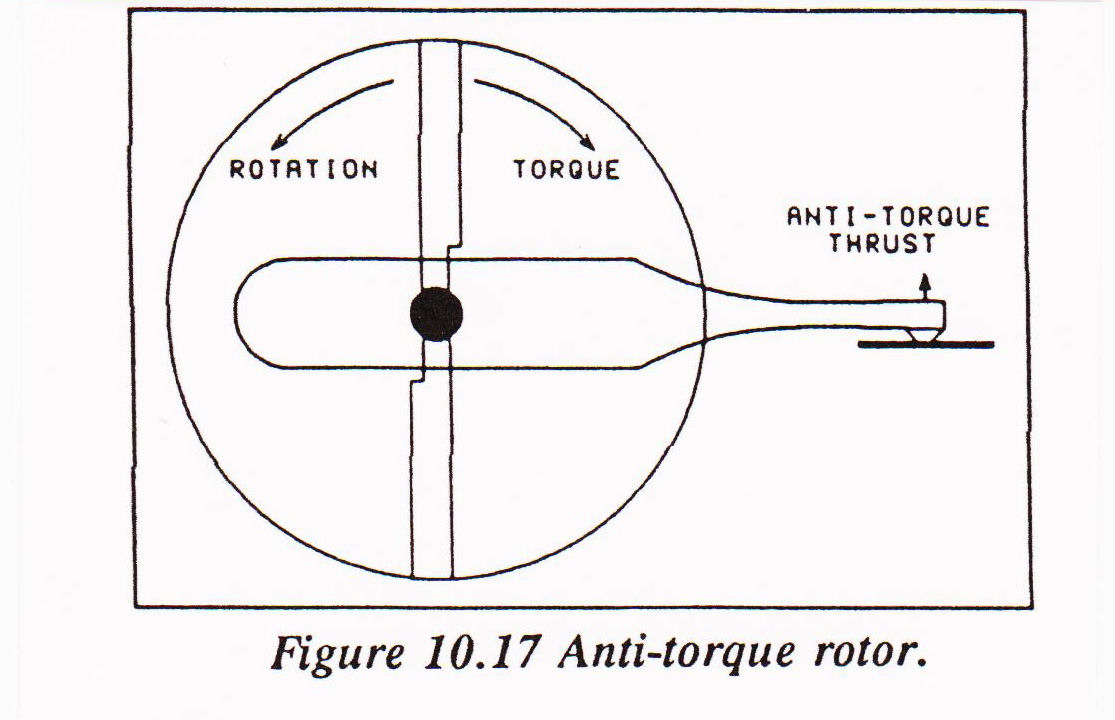
Daarom wordt de staartrotor ook wel ‘anti torque rotor’ genoemd, duidelijk een betere naam dan ‘hekrotor’, wat ik banaal vind klinken. Staartrotoren kunnen zijn uitgevoerd als duwend of trekkend. Het maakt niet uit, zolang ze het hoofdrotorkoppel maar opheffen. De besturing rond de top-as van de heli geschiedt door de staartrotor meer of minder ‘blaas- of zuigkracht’ te geven, door met de richtingsroer (‘Rudder’) knuppel de bladhoek ervan te verstellen.


Cyclische besturing.
Als een heli voorwaarts vliegt, krijgt het naar voren gaande rotorblad lift uit de draaisnelheid PLUS de voorwaartse luchtsnelheid. Het naar achter gaande blad krijgt echter slechts lift uit de draaisnelheid MIN de voorwaartse snelheid (zie figuur 10.23).
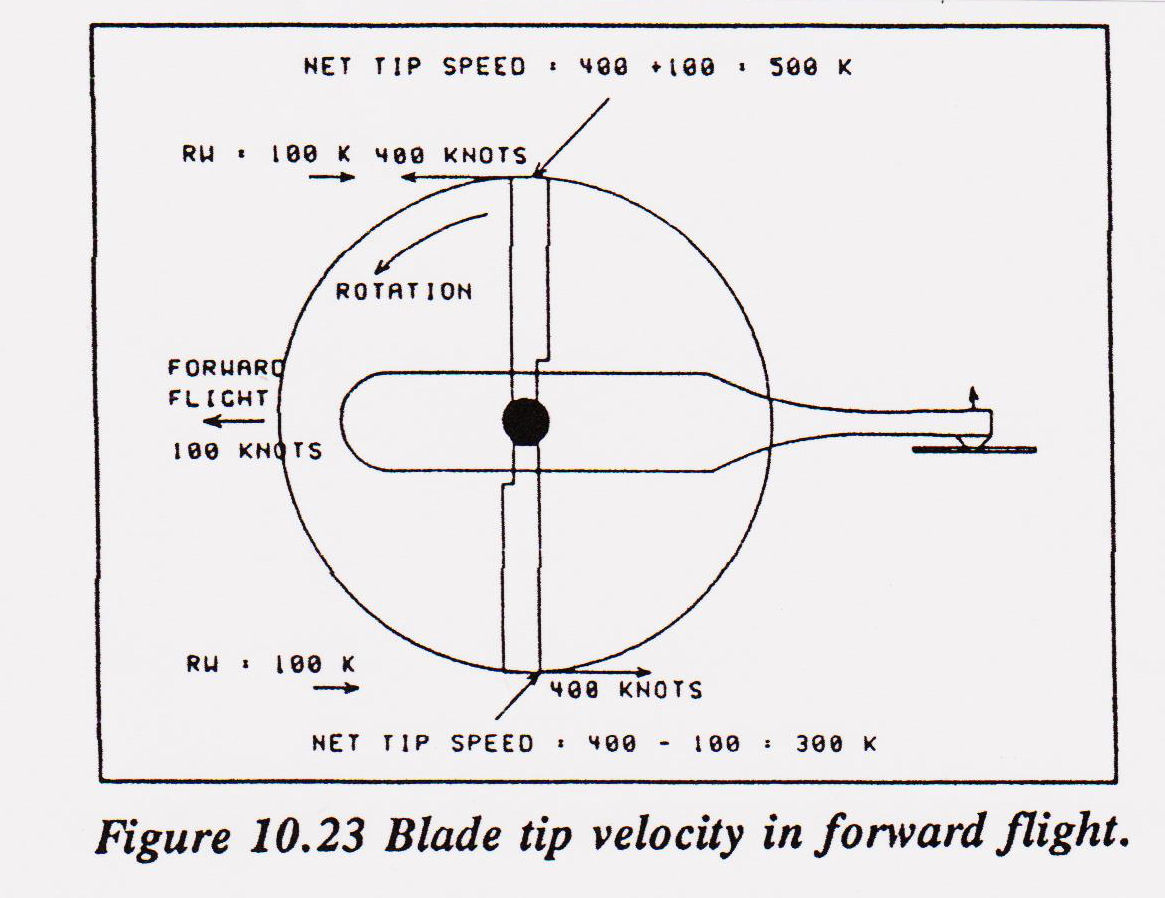
Zouden we hier niets aan doen dan zou de heli ten gevolge van ‘asymmetrische lift’ kantelen en omrollen. Dit in de begintijd van de heli jarenlang onoplosbare probleem is uiteindelijk de wereld uitgeholpen door het achterwaarts gaande blad een grotere invalshoek te geven dan het voorwaarts gaande. Het fenomeen is er ook de oorzaak van dat de topsnelheid van een helikopter sterk is gelimiteerd. Het achterwaarts bewegende blad heeft immers bij toenemende voorwaartse snelheid van de heli een steeds grotere invalshoek nodig, wat onherroepelijk leidt tot overtrekken van dat blad (‘Retreating Blade Stall).
Het is dus zaak dat het rotorsysteem er automatisch voor zorgt dat het voorwaarts gaande blad een kleinere invalshoek heeft dan het achterwaarts gaande. Dus bij ELKE omwenteling van de rotor wordt de bladhoek automatisch en cyclisch versteld. En daar komt dan ook nog bij, dat we met de betreffende stuurknuppel (-s) links, rechts, voor of achter plaatselijk meer lift in de rotor kunnen brengen (plaatselijk een grotere of kleinere invalshoek van het blad) om bochten aan te rollen (bewegen rond de langs-as) of voor of achterover te ‘pitchen’ (om de dwars-as) . In de modelvliegerij wordt overigens voor pitch down of pitch up de term ‘Nick’ gebruikt. Daar hebben we in de bemande helivliegerij dus nog nooit van gehoord…

Om het technisch nóg moeilijker uitvoerbaar te maken, moet een input van een stuurknuppel enige tijd vóór de gewenste positie van het blad al zijn uitgevoerd. Dit heeft te maken met de ‘gyroscopische precessie’. Dit effect is waar te nemen als je een wiel (bijvoorbeeld een klein fietswiel) bij de as pakt en in je hand laat draaien. Als je dan de as van het draaiende wiel wil kantelen, zal je zien dat het 90 graden later (en dus in een andere richting) kantelt. De armpjes van de servo’s voor bijvoorbeeld rollen zitten dus nooit precies aan de zijkant van de helikopter! Verder hebben de hoofdrotorbladen nog last van de zogenaamde ‘Coriolis kracht’. Dit behandel ik hier verder niet, maar duidelijk is wel, dat er bij élke omwenteling nogal wat met de rotorbladen gebeurt. De rondzwiepende bladen moeten door de telkens veranderende weerstand erop ook op hun pad voor of achter kunnen lopen (‘Lead and Lag’). Bovendien moeten ze kunnen anticiperen op de verandering in lift, door op en neer te kunnen bewegen (‘flappen’). Dit betekent dus allemaal dat de rotorbladen ten opzichte van de rotorkop kunnen bewegen, veelal met scharnieren. We spreken dan van een ‘articulated’ of ‘hinged’ (gescharnierd) rotorsysteem. En anders, bij een ‘rigid’ (star) of ‘hingeless’ (scharnierloos) rotorsysteem moeten bladen zelf kunnen buigen, zo ongeveer als een werphengel…
Collectieve besturing.
Als we met onze heli willen stijgen of dalen, kunnen we twee dingen doen: het rotortoerental verhogen en/of de bladhoek vergroten. Geavanceerde modelhelikopters en de meeste bemande heli’s vliegen echter met een vast toerental (Flight-mode). Wat we dan doen is (met de gasknuppel) de bladhoek van alle bladen collectief verstellen. Hierdoor genereert de hoofdrotor dus meer of minder lift, terwijl de eerder behandelde cyclische besturing intact blijft.
Deze twee beschreven aparte processen zitten op je heli en werken al dan niet samen. De totale cyclische en collectieve besturing van een heli is dus een wonderbaarlijk en bijna ongelofelijk fenomeen!
Toerental.
Een rotor heeft om de juiste hoeveelheid draagkracht te kunnen leveren een zeker bedrijfstoerental nodig. Onder dat toerental zal de heli te weinig lift hebben en ook ‘slap’ reageren op de controls. Bovendien verliezen de bladen dan hun stijfheid, waardoor ze opwaarts kunnen gaan buigen of zelfs breken. Tenslotte verlies je bij een te laag toerental het vermogen om nog te kunnen ‘autoroteren’, maar hierover volgende keer meer. Is het toerental echter te hoog, dan is het ook niet goed. Door de exponentieel toenemende centrifugaal krachten kunnen de rotorbladen van de kop loskomen en kan de heli desintegreren. Elk rotorsysteem heeft dus een minimum en maximum toerental, dat gewoonlijk door de heli zelf (met behulp van bijvoorbeeld een ‘governor’) binnen de limieten wordt gehouden. Bij het juiste (normale) toerental is de liftkracht maar 7% van de centrifugaal kracht. De bladen zullen door de geproduceerde lift onderhevig zijn aan een kracht omhoog, en door de centrifugaal kracht aan een buitenwaarts gerichte veel grotere kracht (zie figuur 10.7). De resultante van die krachten zien we in de rotor terug: de bladen staan licht omhoog (dat heet ‘coning’) en de draaiende rotor is geen platte schijf meer, maar een soort vlakke trechter. Hoe zwaarder de heli, of belangrijker, hoe hoger de G-belasting bij stijgen, hoe erger de coning.

Lage hover en het grondeffect.
Vaak hoor ik dat men het heeft over ‘hoeveren’. Dat klinkt mij in de oren als stofzuigen, maar men doelt dan toch echt op het stilhangen met een helikopter. Zelf heb ik de Amerikanen altijd ‘huvveren’ horen zeggen, en zij kunnen het weten, ha, ha… Hoe dan ook, we gaan hoveren, ofwel stilhangen! En dat valt nog niet mee…

Hoveren valt nog niet mee…
Allereerst onderscheiden we stilhangen ten opzichte van de lucht en stilhangen ten opzichte van de grond. In het eerste geval hebben we een zuivere hover. Maar hierbij wordt de heli door de wind meegevoerd en hij verplaatst zich dus ten opzichte van de grond. Waar we het meestal dan ook over hebben is stilhangen ten opzichte van de grond. We moeten ons realiseren dat dit eigenlijk een beetje vliegen is, afhankelijk van de windrichting voorwaarts, zijwaarts, achterwaarts of schuin, en wel omdat we moeten compenseren voor de wind om boven dezelfde plaats te blijven. Zelf geef ik er de voorkeur aan om tegen de wind in te hoveren, omdat dit een beetje voorwaarts vliegen is (ten opzichte van de wind dus).
Als de heli stil in de lucht hangt, blaast de rotor lucht naar beneden met precies zoveel kracht, dat het gewicht van de heli wordt geëlimineerd. Blaast de rotor harder (meer ‘relatieve wind’ van boven naar beneden door de rotor), dan stijgt de helikopter, blaast hij zachter, dan daalt hij. Onder een hoogte van ongeveer één rotordiameter krijgen we te maken met het zogenaamde ‘grondeffect’, net als bij een vleugelvliegtuig onder de hoogte van ongeveer één spanwijdte. Vroeger werd gedacht, dat er een soort ‘luchtkussen’ (of ‘bubble’) onder het vliegtuig dan wel de helikopter ontstond. Dat ‘verklaarde’ ook het zakken bij een voorwaartse of zijwaartse horizontale beweging: het toestel zakte van het luchtkussen af… Maar deze theorie is onjuist gebleken. De naar beneden gaande lucht produceert aan de bladtips een zogenaamde ‘Vortex Ring’ (zie figuren 10.15 en 10.16): de lucht gaat buiten de bladtip in een cirkel omhoog om met vergrote snelheid weer door de rotor naar beneden te gaan. Dit levert circa 10% minder lift op. In het grondeffect stuit de neergaande lucht op de grond en moet zijwaarts verdwijnen. Hierdoor neemt de vortex af en dus de lift toe. De relatieve luchtsnelheid door de rotor (van boven naar beneden) neemt ook af. En er ontstaat onder de helikopter extra (statische) luchtdruk. Tot slot neemt de geïnduceerde weerstand (induced drag) op de rotorbladen af. Samen zorgen die factoren voor meer lift, dus meer draagkracht en minder benodigd vermogen.

Het grondeffect zorgt er dus voor, dat voor het hoveren op elke hoogte boven de grond een ander vermogen benodigd is. Tot we zo hoog hoveren, dat het grondeffect er niet meer is. Het zakken als we horizontaal gaan bewegen komt doordat er dan ‘schonere’ lucht door de rotor wordt gevoerd, waardoor de beschreven effecten verminderen en de lift weer iets afneemt. De zijwaarts wegvloeiende lucht (meestal onregelmatig wegvloeiend door het gras) zorgt ook voor extra turbulentie en dus onstabiliteit. Hoveren buiten grondeffect (Out of Ground Effect, OGE) verdient bij het oefenen dan ook de voorkeur. Als we de heli van de grond laten loskomen (‘oppakken’), moeten we dus steeds iets meer vermogen geven dan we aanvankelijk denken. Dat komt omdat het grondeffect met de toenemende hoogte afneemt, totdat het op een hoogte van circa een rotordiameter geheel weg is. En andersom: bij het ‘neerzetten’ moeten we vermogen verder afdrukken om het tijdens de daling toenemende grondeffect, anders blijft de heli net boven de grond zweven.

Tot zover dit eerste deel. Een volgende keer gaan we kijken wat er gebeurt als we hoger gaan hoveren (buiten grondeffect) of voorwaarts gaan vliegen. Dan komen ook de begrippen drift, translational lift, setling with power en autoroteren aan bod. En de zogenaamde ‘Dead mans curve’! Er zijn natuurlijk veel leden die veel meer ervaring hebben met modelhelikopters dan ik. Schijf je ervaringen op en stuur ze naar de redactie! Voor individuele hulp en gratis vlieglessen (motor A) zie www.modelvliegles.nl. Daar staat ook een oproep aan instructeurs op om mee te doen met (online) lesgeven. Heel leuk werk, maar ik krijg het nog te druk! Tot een volgende keer!

